Des robots ressemblant à des méduses pourraient un jour nettoyer les océans de la planète
Annonces



Des roboticiens de l'Institut Max Planck pour les systèmes intelligents de Stuttgart ont mis au point un robot sous-marin inspiré des méduses, avec lequel ils espèrent un jour collecter les déchets au fond des océans. Le prototype, qui ne fait pratiquement pas de bruit, peut piéger des objets sous son corps sans contact physique, ce qui permet des interactions sûres dans des environnements délicats tels que les récifs coralliens. Le robot-méduse pourrait devenir un outil important pour l'assainissement de l'environnement.

Image symbolique
Computer-generated image
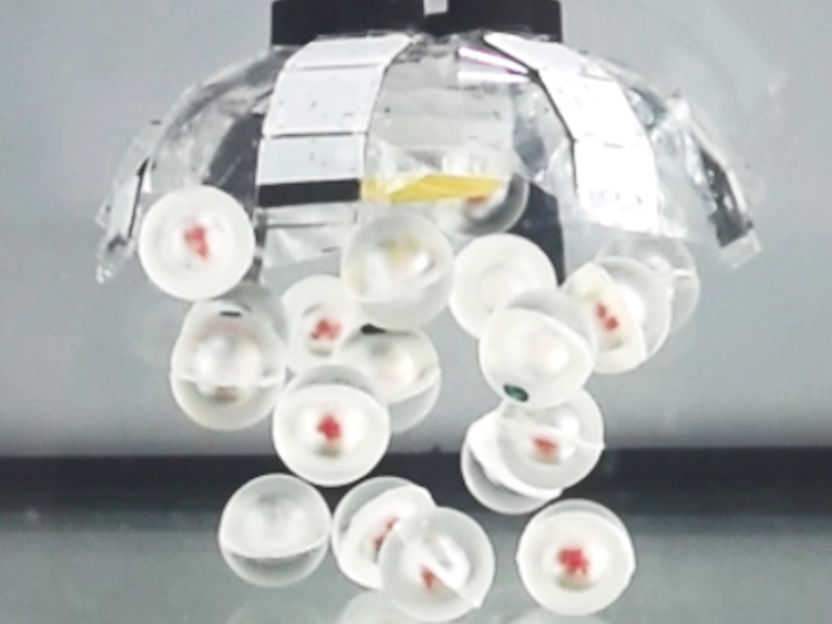
La méduse-robot collecte les déchets
MPI-IS


La majeure partie de la planète est recouverte d'océans, qui sont malheureusement très pollués. L'une des stratégies pour lutter contre les amoncellements de déchets que l'on trouve dans ces écosystèmes très sensibles - en particulier autour des récifs coralliens - consiste à employer des robots pour maîtriser le nettoyage. Cependant, les robots sous-marins existants sont pour la plupart encombrants et dotés de corps rigides, incapables d'explorer et de prélever des échantillons dans des environnements complexes et non structurés, et sont bruyants en raison de leurs moteurs électriques ou de leurs pompes hydrauliques. Pour trouver un modèle plus adapté, les scientifiques de l'Institut Max Planck pour les systèmes intelligents (MPI-IS) de Stuttgart se sont inspirés de la nature. Ils ont configuré un robot de la taille d'une main, inspiré des méduses, polyvalent, économe en énergie et presque silencieux. Jellyfish-Bot est le fruit d'une collaboration entre les départements d'intelligence physique et de matériaux robotiques du MPI-IS. L'article "A Versatile Jellyfish-like Robotic Platform for Effective Underwater Propulsion and Manipulation" a été publié dans Science Advances.
Pour construire le robot, l'équipe a utilisé des actionneurs électrohydrauliques traversés par l'électricité. Les actionneurs servent de muscles artificiels qui alimentent le robot. Autour de ces muscles se trouvent des coussins d'air ainsi que des composants souples et rigides qui stabilisent le robot et le rendent étanche. Ainsi, la haute tension qui circule dans les actionneurs ne peut pas entrer en contact avec l'eau environnante. Une source d'alimentation fournit périodiquement de l'électricité par le biais de fils fins, ce qui provoque la contraction et l'expansion des muscles. Cela permet au robot de nager gracieusement et de créer des tourbillons sous son corps.

"Lorsqu'une méduse nage vers le haut, elle peut piéger des objets sur son chemin en créant des courants autour de son corps. De cette manière, elle peut également collecter des nutriments. Notre robot fait lui aussi circuler l'eau autour de lui. Cette fonction est utile pour collecter des objets tels que les déchets. Il peut ensuite transporter les déchets vers la surface, où ils pourront être recyclés. Il est également capable de collecter des échantillons biologiques fragiles tels que des œufs de poisson. En même temps, il n'y a pas d'impact négatif sur le milieu environnant. L'interaction avec les espèces aquatiques se fait en douceur et presque sans bruit", explique Tianlu Wang. Il est post-doctorant au sein du département d'intelligence physique du MPI-IS et premier auteur de la publication.
Son coauteur, Hyeong-Joon Joo, du département des matériaux robotiques, poursuit : "On estime que 70 % des déchets marins coulent au fond de la mer. Les plastiques représentent plus de 60 % de ces déchets et mettent des centaines d'années à se dégrader. Nous avons donc constaté qu'il était urgent de mettre au point un robot capable de manipuler des objets tels que les déchets et de les transporter vers le haut. Nous espérons que les robots sous-marins pourront un jour contribuer au nettoyage de nos océans".
Les Jellyfish-Bots sont capables de déplacer et de piéger des objets sans contact physique, en fonctionnant seuls ou avec plusieurs robots combinés. Chaque robot fonctionne plus rapidement que d'autres inventions comparables, atteignant une vitesse de 6,1 cm/s. De plus, le Jellyfish-Bot ne nécessite qu'une faible puissance d'entrée, de l'ordre de 100 mW. Il est sans danger pour les humains et les poissons si le matériau polymère qui isole le robot devait un jour se déchirer. Par ailleurs, le bruit du robot ne peut pas être distingué du bruit de fond. Ainsi, le robot méduse interagit doucement avec son environnement sans le perturber, à l'instar de son homologue naturel.
Le robot est constitué de plusieurs couches : certaines le rigidifient, d'autres servent à le maintenir à flot ou à l'isoler. Une autre couche de polymère sert de peau flottante. Des muscles artificiels alimentés électriquement, appelés HASELs, sont intégrés au milieu des différentes couches. Les HASEL sont des poches en plastique remplies de diélectrique liquide et partiellement recouvertes d'électrodes. L'application d'une haute tension sur une électrode la charge positivement, tandis que l'eau environnante est chargée négativement. Cela génère une force entre l'électrode chargée positivement et l'eau chargée négativement qui pousse l'huile à l'intérieur des poches dans un mouvement de va-et-vient, provoquant la contraction et la relaxation des poches, comme dans un vrai muscle. Les HASEL peuvent supporter les fortes contraintes électriques générées par les électrodes chargées et sont protégées de l'eau par une couche isolante. C'est important, car les muscles HASEL n'ont jamais été utilisés auparavant pour construire un robot sous-marin.
La première étape a consisté à développer le Jellyfish-Bot avec une électrode et six doigts ou bras. Dans un deuxième temps, l'équipe a divisé l'électrode unique en groupes distincts afin de les actionner indépendamment.
"Nous avons réussi à saisir des objets en faisant fonctionner quatre des bras comme une hélice et les deux autres comme une pince. Ou bien nous n'avons actionné qu'un sous-ensemble de bras, afin de diriger le robot dans différentes directions. Nous avons également cherché à savoir comment faire fonctionner un collectif de plusieurs robots. Par exemple, nous avons pris deux robots et les avons laissés ramasser un masque, ce qui est très difficile pour un seul robot. Deux robots peuvent également coopérer pour porter des charges lourdes. Cependant, à ce stade, notre robot-méduse a besoin d'un fil. C'est un inconvénient si nous voulons vraiment l'utiliser un jour dans l'océan", explique Hyeong-Joon Joo.
Peut-être que les câbles alimentant les robots appartiendront bientôt au passé. "Notre objectif est de développer des robots sans fil. Heureusement, nous avons franchi la première étape vers cet objectif. Nous avons intégré tous les modules fonctionnels, tels que la batterie et les éléments de communication sans fil, afin de permettre de futures manipulations sans fil", poursuit Tianlu Wang. L'équipe a fixé une unité de flottabilité au sommet du robot et une batterie et un microcontrôleur à la base. Ils ont ensuite fait nager leur invention dans l'étang du campus Max Planck de Stuttgart et ont réussi à la diriger. Jusqu'à présent, cependant, ils n'ont pas pu ordonner au robot sans fil de changer de cap et de nager dans l'autre sens.
Connaissant l'équipe, il ne faudra pas longtemps pour atteindre cet objectif.
Note: Cet article a été traduit à l'aide d'un système informatique sans intervention humaine. LUMITOS propose ces traductions automatiques pour présenter un plus large éventail d'actualités. Comme cet article a été traduit avec traduction automatique, il est possible qu'il contienne des erreurs de vocabulaire, de syntaxe ou de grammaire. L'article original dans Anglais peut être trouvé ici.




Autres actualités du département science




















Ces produits pourraient vous intéresser