To use all functions of this page, please activate cookies in your browser.
My watch list
my.chemeurope.com
my.chemeurope.com
With an accout for my.chemeurope.com you can always see everything at a glance – and you can configure your own website and individual newsletter.
- My watch list
- My saved searches
- My saved topics
- My newsletter
Standard Linear Solid modelThe Standard Linear Solid model (SLS) also know as the Kelvin model [1] is a method of modeling the behavior of a viscoelastic material using a linear combination of springs and dashpots to represent elastic and viscous components, respectively. Often more similar Maxwell model and the Kelvin-Voigt model are used. These models are often proved insufficient, however; the Maxwell model does not describe creep, and the Kelvin-Voigt model does not describe stress relaxation. SLS is the simplest model that predicts both phenomena. Product highlight
DefinitionMaterials undergoing strain are often modeled with mechanical components, such as springs (restorative force component) and dashpots (dampening component). Connecting a spring and damper in series yields a model of a Maxwell material while connecting a spring and damper in parallel yields a model of a Kelvin-Voigt material [2]. In contrast to the Maxwell and Kelvin-Voigt models, the SLS is slightly more complex, involving elements both in series and in parallel. Springs, which represent the elastic component of a viscoelastic material, obey Hooke's Law: where σ is the applied stress, E is the Young's Modulus of the material, and ε is the strain. The spring represents the energetic or elastic component of the model's response [2]. Dashpots represent the viscous component of a viscoelastic material. In these elements, the applied stress varies with the time rate of change of the strain: where η is viscosity of the dashpot component. These elements are connected as shown on the picture: This model consists of two systems in parallel. The first, referred to as the Maxwell arm, contains a spring (E = E2) and dashpot (viscosity η) in series[2]. The other system contains only a spring (E = E1). Solving the ModelIn order to model this system, the following physical relations must be realized: For parallel components: σtot = σ1 + σ2 , and For series components: σtot = σ1 = σ2 , and These relationships help relate the various stresses and strains in the overall system and the Maxwell arm:
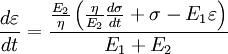
where the subscripts M, D, S1,and S2 refer to Maxwell, dashpot, spring one, and spring two, respectively. Using these relationships, their time derivatives, and the above stress-strain relationships for the spring and dashpot elements, the system can be modeled as follows: The relaxation time, τ, is different for each material and is equal to Model CharacteristicsThe Standard Linear Solid model combines aspects of the Maxwell and Kelvin-Voigt models to accurately describe the overall behavior of a system under a given set of loading conditions. The behavior of a material applied to an instantaneous stress is shown as having an instantaneous component of the response. Instantaneous release of a stress also results in a discontinuous decrease in strain, as is expected. The shape of the time-dependent strain curve is true to the type of equation that characterizes the behavior of the model over time, depending upon how the model is loaded. Although this model can be used to accurately predict the general shape of the strain curve, as well as behavior for long time and instantaneous loads, the model lacks the ability to accurately model material systems numerically. References
See alsoCategories: Materials science | Non-Newtonian fluids |
|
| This article is licensed under the GNU Free Documentation License. It uses material from the Wikipedia article "Standard_Linear_Solid_model". A list of authors is available in Wikipedia. |